
为了促进自主机器人领域一线青年学者/工程师的交流,推动学术界与企业界的交融与产学研合作,搭建一个深度、纯粹的技术交流平台,中国自动化学会决定主办自主机器人技术研讨会(Autonomous Robotic Technology Seminar,简称ARTS)。
自主机器人技术研讨会(ARTS)作为中国自动化学会青年菁英系列活动(CAA Youth e-Summit)的重要组成部分,倡导理性批判、敢于质疑、务实的科学精神,积极探索自由平等的思想交锋。ARTS主要关注传感与感知、自主导航、状态估计、移动机器人定位建图、运动规划、建模与控制、多机器人系统等方向。
第一届大会将于2023年11月25日-26日在香港科技大学(广州)举办。诚挚邀请您参加,并对大会的组织提供意见和建议!
一、组织机构
主办单位:中国自动化学会
承办单位:香港科技大学(广州)机器人与自主系统学域
协办单位:深蓝学院
二、大会组委会
大会主席
刘 明 香港科技大学(广州)
张 楠 中国自动化学会
周 易 湖南大学
程序委员会主席
高 飞 浙江大学
王超群 山东大学
马 骏 香港科技大学(广州)
秦 通 上海交通大学
圆桌论坛主席
刘 哲 上海交通大学
陈谢沅澧 国防科技大学
殷 鹏 香港城市大学
安琪儿 西北工业大学
论文展示主席
朱 磊 香港科技大学(广州)
焦健浩 香港科技大学(广州)
张雪涛 大连理工大学
企业联络主席
王 越 浙江大学
海外联络主席
杨 硕 卡内基梅隆大学
范 睿 同济大学
本地主席
赵 航 香港科技大学(广州)
季一丁 香港科技大学(广州)
姚 瑶 香港科技大学(广州)
三、合作企业
铂金合作单位:华为、美团机器人研究院
金牌合作单位:本末科技、智科特、武汉京天、度量科技
银牌合作单位:追觅科技、云深处、凌云光
合作媒体:、点云PCL、计算机视觉life、3D视觉工坊
支 持 单 位:将门创投
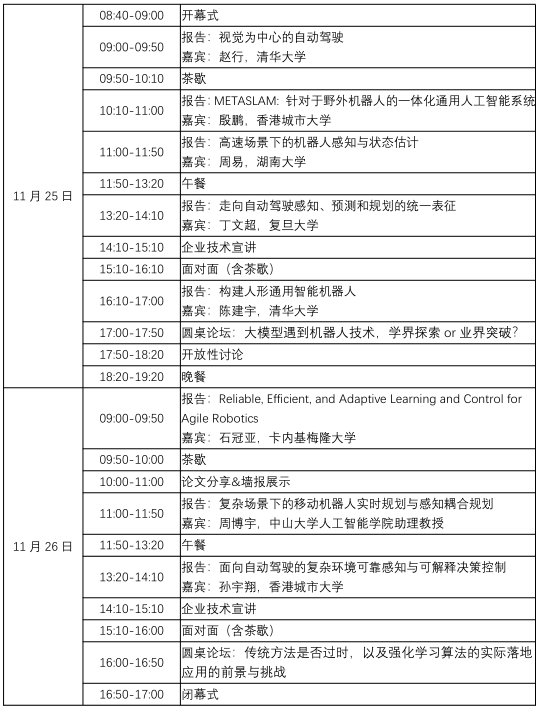
四、会议日程
五、分享内容及嘉宾介绍
赵行
清华大学交叉信息研究院(“姚班”)助理教授
报告题目:
视觉为中心的自动驾驶
报告摘要:
随着高级辅助驾驶的应用落地,以及视觉的泛化能力的体现,视觉为主的自动驾驶技术受到了学术界和工业界的广泛关注。本次报告赵行老师将讲述视觉自动驾驶方向三方面的工作:(1)基于视觉的3D占用网络,实现通用障碍物的感知。(2)基于神经先验的地图构建范式,用于替代传统的高精度地图以及在线地图感知方法。(3)基于视觉语言大模型的自动驾驶场景理解。
报告人简介:
赵行,清华大学交叉信息研究院(“姚班”)助理教授,博士生导师。博士毕业于麻省理工学院MIT,后于谷歌无人车项目Waymo担任研究科学家。研究涵盖自动驾驶的整个算法栈,以及多模态机器学习。提出了自动驾驶感知和预测中一系列框架型的工作,为行业大多数公司所使用或借鉴。研究工作曾被BBC, NBC, 麻省理工科技评论等报道。曾获2015年ICCP最佳论文奖,入选2020年福布斯中国30Under30。

殷鹏
香港城市大学助理教授
报告题目:
METASLAM: 针对于野外机器人的一体化通用人工智能系统
报告摘要:
随着当今机器人技术的发展,传统意义上的移动机器人系统中的核心模块,如定位导航、建模感知和规划决策等,已经从分散且独立的专用性单元拓展为具有整体一致性的系统。如无人驾驶和最后一公里物流配送系统等,一次成功的规划任务不但需要高精度的机器人定位能力、高效率的机器人实时感知、高稳定的机器人实时决策等模块,每一个环节都扮演者至关重要的一环。虽然着服务机器人的兴起,人们对于复杂环境下的机器人系统设计提出了更高的要求。在Tesla的人形机器人系统中和ETHz的Anymal四足机器人中,机器人系统要在基本定位、建模、决策功能基础上,根据真实环境的反馈不断优化自己的行为,同时具备任务拆分的能力,从而能在现实环境中完成复杂的工作。本次讲座中,我将结合一些核心项目为大家分享当前野外机器人的核心难点,重点分析机器人系统在长航程、大范围环境中,所面临的研究挑战,并从以下四个点展开我们过去五年的研究工作:1)高精度定位,2)高精度众包地图,3)多机器人协同规划问题,4)长期工作中的终身学习问题,和 5)适用于复杂环境的具身智能机器人系统。
报告人简介:
殷鹏, 香港城市大学助理教授,中国科学院沈阳自动化所博士,前卡内基梅隆大学机器人研究所项目科学家,NASA火星登陆项目高级顾问。长期承担前沿定位导航研究,包括:1)CMU Darpa SubT 地下机器人挑战项目,定位建模负责人 (2019年冠军组);2)NASA 无人机长航程定位负责人;3)CMU Bosch, 室内3D重构项目负责人;4)NVIDA 地图众包项目负责人。在IROS,ICRA,RSS,RAL, IEEE T-RO, IEEE TIE, IEEE TITS 等多个机器人顶会顶刊发表论文,其中以一作身份发表机器人顶刊IEEE T-RO 三篇。由其承办的MetaSLAM项目,汇集了6年相关Field Robotics领域的研究成果,致力于突进大规模多机器人系统的定位、建模、感知、决策。

周易
湖南大学教授
报告题目:
高速场景下的机器人感知与状态估计
报告摘要:
机器视觉在机器人感知、导航和控制等任务中扮演着非常重要的角色,然而传统视觉传感器及其算法在执行高速移动机器人任务时存在诸多不足。首先,在高速场景下(如高速自运动或场景中存在高速独立运动物体),运动模糊会导致特征提取与数据关联失效;其次,在某些高速机器人应用场景下,传统相机的两次曝光时间间隔会产生致命的系统延迟。因此,高速机器人视觉任务需要能在高速运动下对视觉信息进行采样的传感器以及与传感器特性匹配的算法。本次报告将以高速空中机器人的状态估计和智能辅助驾驶中的碰撞检测等任务为例,介绍NAIL实验室近期基于事件相机的机器人视觉感知与状态估计的研究进展。
报告人简介:
周易,湖南大学教授,博士生导师,主要从事基于先进视觉传感器的机器人感知与导航技术研究,研究兴趣包括视觉里程计(VO/SLAM)、类神经形态视觉传感器(Neuromorphic Event-based Camera)、状态估计、多视角几何理论等。博士毕业于澳大利亚国立大学,毕业后加入魔视智能(上海)科技有限公司担任定位与建图技术负责人,其后在香港科技大学与DJI联合实验室从事博士后研究,主持了基于事件相机的感知与定位技术项目工作。近些年主要代表作包括2篇IEEE T-RO一作文章等,目前担任IEEE RA-L期刊定位与建图细分领域的AE。

丁文超
复旦大学工程与应用技术研究院青年研究员
报告题目:
走向自动驾驶感知、预测和规划的统一表征
报告摘要:
近年来,自动驾驶技术取得了巨大的进展,广泛影响了机器人领域的各个方面。在感知领域,BEV前融合已成为一个高效且高质量的特征表示方式。在预测方面,它的重要性不断凸显,一方面与BEV感知特征更深入地融合,另一方面也在探索与决策的紧密结合方式。在规划方面,如何更好地将感知、预测特征融入决策规划成为一个热门问题。尽管这三个方面之间的关联日益紧密,但如何最佳地整合它们,以便自动驾驶车辆可以在真实世界中与环境和其他交通参与者进行交互和闭环操作,仍然是一个关键问题。本报告将介绍一系列与感知、预测和决策相关的工作,并分享关于更好地整合这三个方面的思考和探索。
报告人简介:
丁文超,复旦大学工程与应用技术研究院青年研究员。博士毕业于香港科技大学电子及计算机工程系,曾任职华为车BU,致力于智能驾驶预测决策方面研究。近5年来以第一/通讯作者身份在TRO、JFR、RAL、ICRA等机器人领域顶级期刊和会议上发表高质量论文十余篇。曾以华为“天才少年”身份,在华为车BU担任预测领域技术专家,作为核心贡献者参与打造了华为ADS1.0以及ADS2.0智能驾驶系统,贡献了业界领先的智能驾驶预测方案,并实现在北汽极狐、长安阿维塔以及问界2023智驾版等多款车型上的商用。在复旦,担任集群机器人系统实验室(MagicLab)负责人,致力于打造面向机器人和智能驾驶的通用人工智能。

陈建宇
清华大学交叉信息研究院助理教授
报告题目:
构建人形通用智能机器人
报告摘要:
造出像人一样的智能机器,成为造物主是人类一直以来的梦想。以ChatGPT为代表的AGI只能被称作“缸中大脑”,未来更为强大的AGI还应该有灵活的四肢和身体,从而具备和世界更深层次交互的能力,创造出更大的价值。而人形机器人由于其完美适应于人类社会与环境的形态,将有望成为AGI的最佳具身载体。本次报告将介绍团队在构建人形通用智能机器人方面的进展与成果,包括人形机器人的硬件本体研发、运动与操作的小脑部分算法、结合大语言模型的机器人决策,以及对商业落地前景的思考。
报告人简介:
陈建宇,清华大学交叉信息研究院助理教授、星动纪元创始人。他在清华大学取得学士学位,在加州大学伯克利分校取得博士学位,师从美国国家工程院院士、机电控制学科先驱Masayoshi Tomizuka教授。他近年来在机器人与人工智能的交叉领域从事前沿研究与产业化探索。他的目标是构建出具备高性能、高智能的通用智能机器人软硬件系统。他在机器人与人工智能领域的国际顶级会议和期刊上发表了五十余篇论文,部分论文入围L4DC 2022、IEEE IV 2021、IFAC MECC 2021等国际会议优秀论文奖。他在2021年入选了“福布斯中国30under30” 榜单。
石冠亚
卡内基梅隆大学(CMU)计算机学院机器人研究所助理教授
报告题目:
Reliable, Efficient, and Adaptive Learning and Control for Agile Robotics
报告摘要:
Recent breathtaking advances in machine learning beckon to their applications in a wide range of real-world autonomous systems. However, for agile robotic control in unstructured or hazardous environments, we must confront several key challenges before widespread deployment. Most importantly, the learning system must interact with the rest of the autonomous system (e.g., highly nonlinear and non-stationary dynamics) in a way that safeguards against catastrophic failures with formal guarantees. In addition, from both computational and statistical standpoints, the learning system must incorporate prior knowledge for efficiency and generalizability.
In this talk, I will present progress toward establishing reliable, efficient, and adaptive learning and control methods for agile robotics, through principled and structured integrations of deep learning and nonlinear control. I will introduce three different types of integrations: (1) learning residual dynamics for nonlinear control with guarantees; (2) structured reinforcement learning and control; and (3) learning optimizers for model predictive control.
报告人简介:
石冠亚,卡内基梅隆大学(CMU)计算机学院机器人研究所助理教授,本科毕业于清华大学,博士毕业于加州理工学院控制与动力系统专业。2022至2023年,他在华盛顿大学计算机学院担任博士后研究员。他的学术兴趣是机器学习与控制理论的结合,以及在敏捷机器人控制与智能决策中的应用。他的具体研究内容包括模型预测控制、自适应控制、鲁棒控制、强化学习、在线学习,以及表征学习和元学习,应用包括无人机、足式机器人、无人车,以及多智能体系统。

周博宇
中山大学人工智能学院助理教授
报告题目:
复杂场景下的移动机器人实时规划与感知耦合规划
报告摘要:
近年来,自主移动机器人技术迅猛发展,在状态估计、运动规划、地图重建等领域取得了显著的进步。然而,面对高度非线性和高维度的系统,高效且鲁棒的运动规划仍然是一个具有挑战性的任务,特别是在复杂环境中实现灵活且安全的运动。同时,许多应用场景要求更高质量的三维重建地图,以获得更高精度的几何和纹理信息。此外,许多任务需要将运动规划与感知模块紧密结合,以实现对复杂场景的高效感知,如未知环境的自主探索、复杂三维结构的巡检以及缺乏特征场景的鲁棒定位等。本报告中,我们将介绍STAR课题组近期围绕以上三方面挑战的研究进展。我们将讨论以无人机吊载系统和移动操作机器人为代表的实时运动规划的方法,以及基于混合表征的地图重建方法。此外我们还将分享如何整合感知和规划模块,以实现对复杂环境的高效感知。
报告人简介:
周博宇,中山大学人工智能学院助理教授,STAR课题组(SmarT Autonomous Robotics Group)负责人。本科毕业于上海交通大学,博士毕业于香港科技大学电子与计算机工程系。曾获香港科技大学卓越学术奖,上海市优秀毕业生等荣誉。主要从事无人机、移动机器人自主导航、规划、自主探索与重建相关研究。近年来在TRO、RAL、ICRA、IROS等机器人邻域顶级期刊和会议发表论文二十余篇,其中第一/通讯作者12篇。多个工作被列为TRO、RAL 最受欢迎论文(最高排名第一),多次被 IEEE Spectrum 等知名科技媒体报道。以第一作者完成的无人机运动规划、自主探索开源项目 Fast-Planner,FUEL 等在Github 累计获得 star 超过 2500 次。

孙宇翔
香港城市大学助理教授
报告题目:
移动机器人自主导航是实现自动驾驶技术的核心。自主导航是指在无人介入的情况下,自主控制无人车,安全可靠地从起点运动到终点。自主导航系统主要包括感知与控制两个方面。近年来,随着人工智能技术的发展,基于深度学习的自动驾驶感知与控制也取得了显著的进步。然而,在感知方面,现有算法在复杂环境,仍难以得到可靠的结果;在控制方面,现有端到端网络的输出难以解释,从而限制了网络在实际场景中的应用。本报告将围绕自动驾驶自主导航,分别介绍本课题组在复杂环境感知以及可解释决策控制方面的工作。
报告摘要:
机器人本体在复杂环境中的连续运动,对其视觉系统提出了诸多挑战:传感器外参数随运动实时改变、运动导向的视觉感知任务、训练学习负样本少、系统的实时性和在线自主性能要求高。如何从自然界很多动物卓越的运动性能、有限的视觉能力和受限的学习机制中受到启发,建立基于仿生感知与自主学习的机器人视觉系统,是一个很有前途的研究方向。报告系统介绍了北大机器人视觉团队在上述领域的研究探索和最新成果,并通过新一代智能导购机器人系统,展示了创新成果的集成应用。
报告人简介:
孙宇翔,香港城市大学助理教授,博士毕业于香港中文大学,其主要研究方向有机器人与人工智能、自动驾驶、移动机器人、自主导航等。在机器人、人工智能等领域发表论文70余篇,Google scholar引用次数2100余次,并于2022年入选百度AI华人青年学者榜全球50强,以及斯坦福大学全球Top2%高引科学家。他以第一作者身份获得 IEEE-ROBIO 2019 会议最佳论文奖和 IEEE-ROBIO 2015 会议最佳学生论文入围奖,并担任TRO、RA-L、TASE、TITS、IJCV、TPAMI、TIP、ICRA、IROS、RSS等多个知名期刊和会议的审稿人。
开放式讨论环节候选议题(参会者投票,票选最高的2-3个议题进入开放式讨论环节):
1. 下一个自主机器人应用的爆点在哪里?
2. 如何深入一个新的研究领域?
3. 机器人专业就业抓风口还是读博?
4. 为什么95%以上的论文业界都用不上,实习重要还是写论文重要?
5. 导师给的方向不喜欢怎么办?论文反复被拒怎么办?
6. 计算机视觉和机器人感知方向的异同和选择。
注:开放式讨论环节的议题,目前仍处于向参会者征集的阶段。
六、会议注册
会议注册费用为:
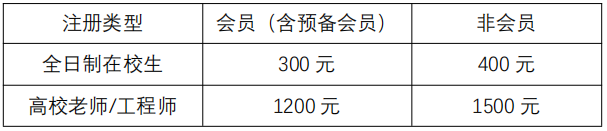
非会员可以先注册成为会员,再报名参会。全入职在校学生注册会员时选择预备会员,高校老师/工程师注册普通会员。全日制在校生参会时需携带学生证,便于现场确认。
会议限报600人,注册费包括会议资料费、2天午餐以及1天晚餐,其他食宿与交通自理。
会议注册详情见链接:https://www.roboarts.cn/list/register

七、联系方式
深蓝学院
联系人:朱文彬
联系电话:18502950741(同微信)
联系邮箱:
zhuwenbin@shenlanxueyuan.com
中国自动化学会办公室
联系人:屈洋
联系电话:010-62522248
联系邮箱:caa@ia.ac.cn
原文链接:https://blog.csdn.net/Yong_Qi2015/article/details/133781750?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169900313716800188542844%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=169900313716800188542844&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_ecpm_v1~times_rank-1-133781750-null-null.nonecase&utm_term=%E6%BE%B3%E6%B4%B22023

